

| 专利名称 | 多机械臂系统的分布式自适应协调控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN201610983132.X | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2016-11-08 | 授权日 | 2019-05-14 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 交换通信网络|欧拉·拉格朗日|分布式计算|自适应|网络拓扑|欧拉-拉格朗日方程|不利影响|控制算法|机械手系统|机械系统 | ||
| 应用领域 | 自适应控制 | ||
| 意向价格 | 具体面议 | ||
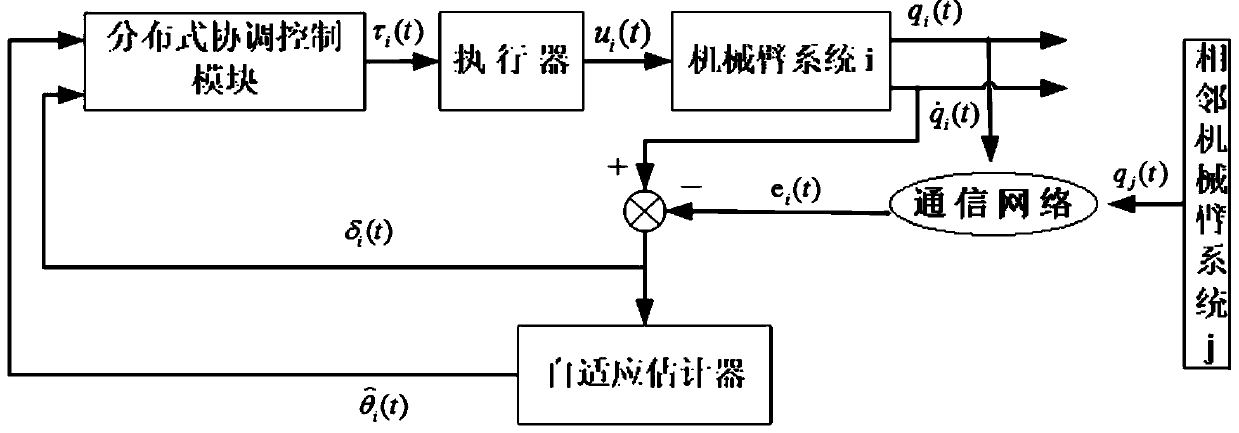
| 专利概述 | 本发明公开了一种多机械臂系统的分布式自适应协调控制方法,该方法以多个欧拉‑拉格朗日方程表示具有不确定性参数的非线性多机械臂系统,考虑系统通信网络切换和具有通信时滞的情况下,利用控制力矩来分布式地协调控制各个机械臂系统关节的转动角度和角速度,通过设计分布式自适应协调控制算法使含有不确定参数的非线性多机械臂系统的转动角度实现一致同步,同时其转动角速度都为零。通过本发明方法设计的分布式自适应协调控制器能够解决多机械臂系统中的不确定性参数、有向切换通信网络拓扑结构和存在通信时滞等实际因素对系统性能带来的不利影响,实现了多机械臂系统的稳定和有效运行。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










