

| 专利名称 | 一种仿生柔性足式张拉机构 | ||
|---|---|---|---|
| 申请号/专利号 | CN201810521355.3 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2018-05-28 | 授权日 | 2025-01-07 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 机械设备|万向接头|球形接头|气弹簧|轴承|光轴|法兰 (机械)|物理学 | ||
| 应用领域 | 程序控制机械手|接头|机动车 | ||
| 意向价格 | 具体面议 | ||
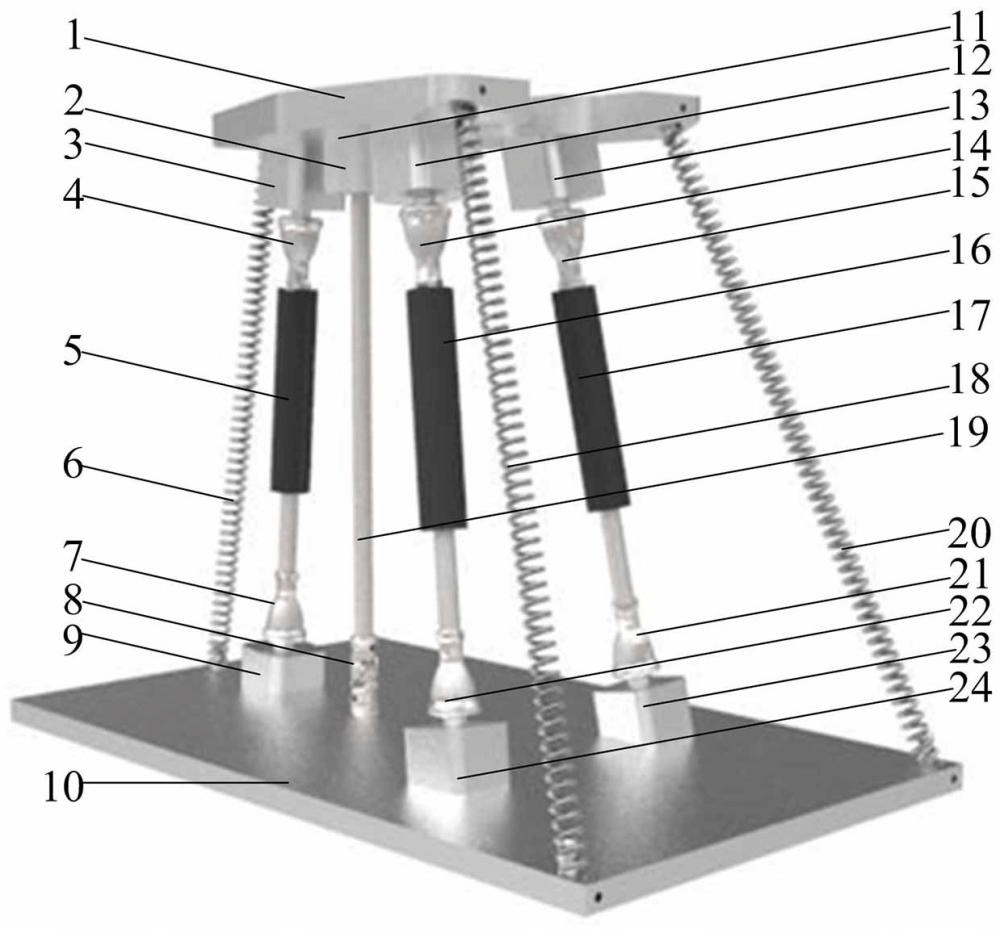
| 专利概述 | 仿生柔性足式张拉机构,属于机械设备技术领域,包括上端顶板,下端底板,七个连接构件,六个球关节轴承,三个气弹簧,带有法兰座的直线轴承,光轴,十字万向节,三个拉簧。光轴通过带法兰座的直线轴承和连接构件与上端顶板连接,通过十字万向节与下端底板连接,弹簧通过球关节轴承分别与上端连接构件、下端连接构件连接,上端顶板通过拉簧与底板连接。通过机构的可变形,实现自适应地形的功能,在机械设备技术领域具有广阔的应用前景。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










