

| 专利名称 | 基于张拉整体结构的仿生足机构 | ||
|---|---|---|---|
| 申请号/专利号 | CN201810521085.6 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2018-05-28 | 授权日 | 2023-05-02 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 机器人|机械设备|球形接头|轴承|物理学|撞击|张拉整体 | ||
| 应用领域 | 机动车 | ||
| 意向价格 | 具体面议 | ||
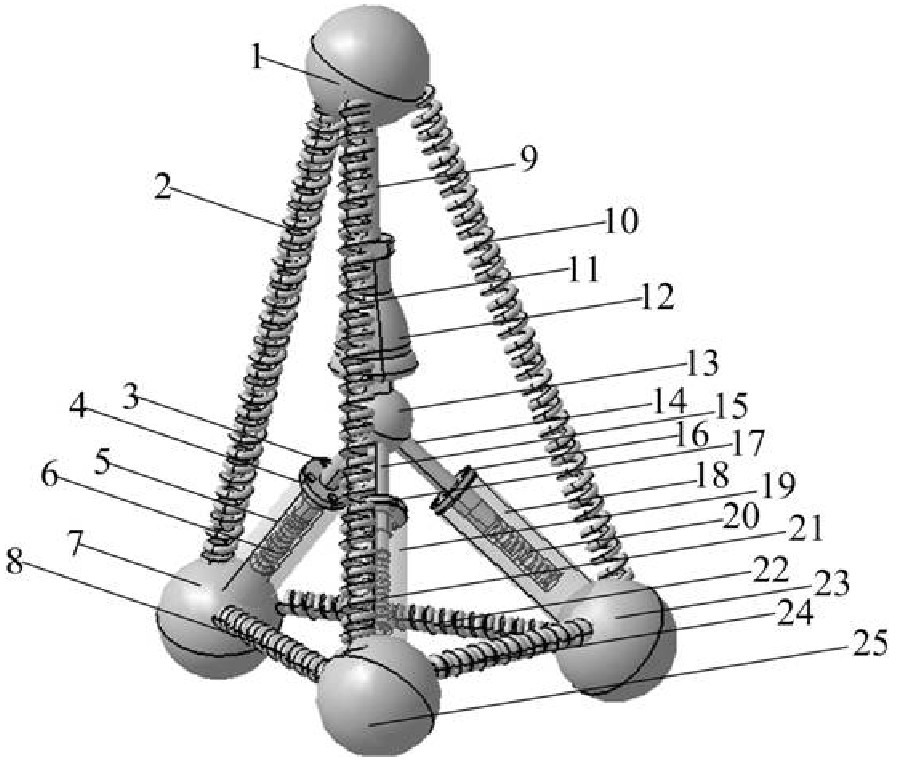
| 专利概述 | 本发明属于机械设备技术领域,特别是涉及到一种具有缓冲和减震特性的仿生足机构,其特征包括连接件,拉簧,固定杆,球关节轴承,轴,直线轴承,套筒,压簧。基于张拉整体结构弹性变形的特点,提出一种仿生足机构的设计方法,具有结构简单,尺寸相对较小,成本低廉的特点,能够实现缓冲与减震功能。本发明可应用于机器人行走装置以减缓地面冲击力。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










