

| 专利名称 | 仿生蜘蛛行走机器人 | ||
|---|---|---|---|
| 申请号/专利号 | CN201810635288.8 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2018-06-20 | 授权日 | 2024-06-28 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 控制工程|结构工程|活性聚合物|工作空间|粘合剂粘合|电活性聚合物|类机器人|环境适应|救援工作 | ||
| 应用领域 | 程序控制机械手|机动车 | ||
| 意向价格 | 具体面议 | ||
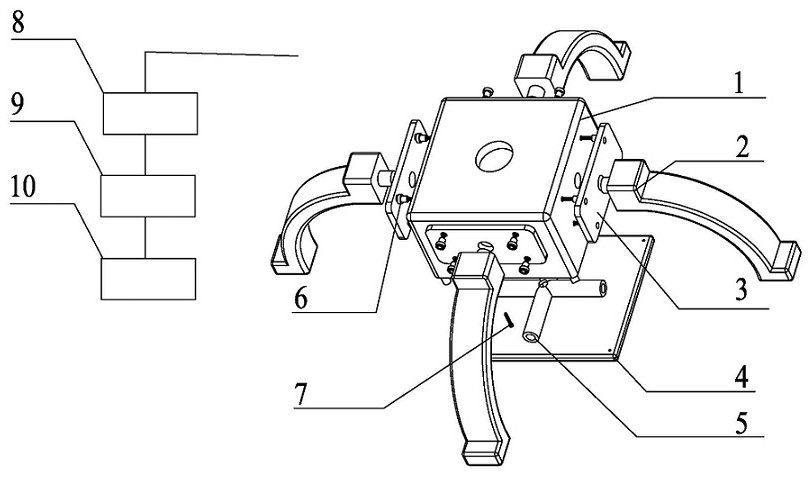
| 专利概述 | 本发明公开了一种仿生蜘蛛行走机器人,以解决刚性机器人结构刚性强,环境适应性差等问题。该软体机器人包括外壳、电活性聚合物驱动足、贴合板、底部承接板、轴端保护器、加固螺钉和长型固定螺钉;电活性聚合物驱动足通过胶接固定于金属贴合板上,同时贴合板通过螺纹连接固定于金属外壳上。底部承接板通过螺纹连接固定于外壳上。仿生蜘蛛行走机器人更加灵活和多功能,同时能够根据环境状况而灵活改变自身形状,对工作空间狭小及非结构化环境具有独特的适应能力,为救援工作提供帮助。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










