

| 专利名称 | 基于参数优化可重构模块化柔性机械臂轨迹跟踪控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN201811450310.8 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2018-11-30 | 授权日 | 2021-09-14 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 电机|控制工程|机械手臂|机械手|自适应|终端滑动模式控制|多目标优化|非线性|系统工程|输入输出线性化 | ||
| 应用领域 | 程序控制机械手 | ||
| 意向价格 | 具体面议 | ||
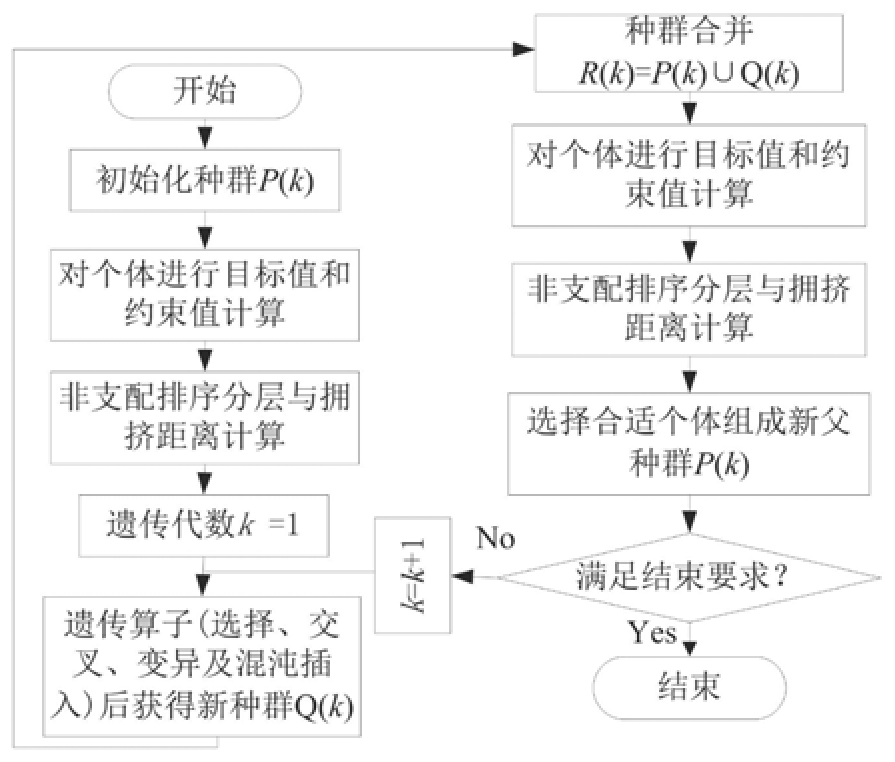
| 专利概述 | 基于参数优化可重构模块化柔性机械臂轨迹跟踪控制方法涉及可重构模块化柔性机械臂控制领域,其建立单关节智能体柔性机械臂系统模型,利用重新定义输出的思想,将关节电机转角和柔性模态变量的线性组合作为柔性机械臂系统的输出,通过输入输出线性化,将单关节柔性机械臂系统分解为输入输出子系统和零动态子系统两部分。本发明采用自适应动态终端滑模控制使得输入输出子系统有限时间跟踪期望的参考轨迹,通过采用NSGA‑II算法对设计参数λ0i,λ1i进行多目标优化设计,使柔性机械臂系统的零动态子系统在平衡点附近渐进稳定,从而保证整个柔性机械臂系统对期望轨迹的跟踪要求;本发明对系统的非线性不确定性具有更好的鲁棒性。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










