

| 专利名称 | 一种六自由度可穿戴柔性绳驱外骨骼式上肢康复训练机器人 | ||
|---|---|---|---|
| 申请号/专利号 | CN201920850715.4 | 专利权人(第一权利人) | 长春理工大学 |
| 申请日 | 2019-06-06 | 授权日 | 2020-06-23 |
| 专利类别 | 实用新型 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 整个系统|物理治疗|上肢康复|外骨骼|康复训练|上肢功能障碍|人手臂|地面支援 | ||
| 应用领域 | 被动锻炼用器械 | ||
| 意向价格 | 具体面议 | ||
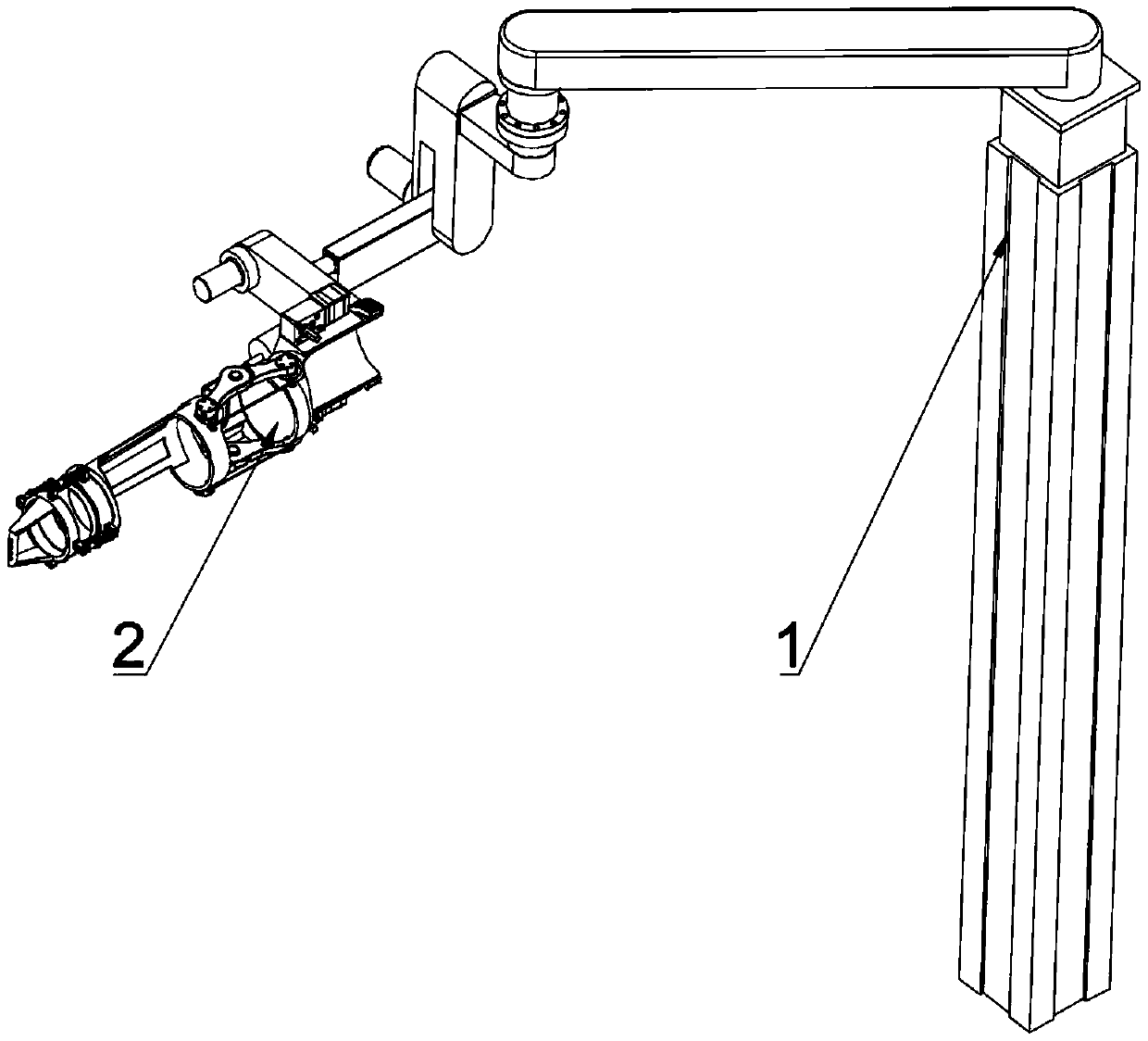
| 专利概述 | 本实用新型针对现有技术的不足,提供一种六自由度可穿戴柔性绳驱外骨骼式上肢康复训练机器人,采用了绳驱动的方式,装置惯性小,系统整体具有运动连贯性与流畅性,避免了对患者的二次伤害;并且未通过关节转盘等较大机构来实现关节所需的自由度,空间利用率高,穿戴更舒适,更轻便,更贴合人手臂的运动特性;拥有六个主动自由度,可对上肢功能障碍人群提供全方位安全可靠的康复训练。本实用新型提供了一种六自由度可穿戴柔性绳驱外骨骼式上肢康复训练机器人,其组成包括:地面支撑部分和可穿戴部分,其中地面支撑部分中的立柱与地面连接,地面支撑部分中的圆弧导轨模块与穿戴部分中的大臂固定装置连接。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










