

| 专利名称 | 六足仿生机器人 | ||
|---|---|---|---|
| 申请号/专利号 | CN201920952669.9 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2019-06-24 | 授权日 | 2020-08-04 |
| 专利类别 | 实用新型 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 机械手|控制理论|搜索与救援|仿真|六足|方向盘 | ||
| 应用领域 | 机械手|机动车 | ||
| 意向价格 | 具体面议 | ||
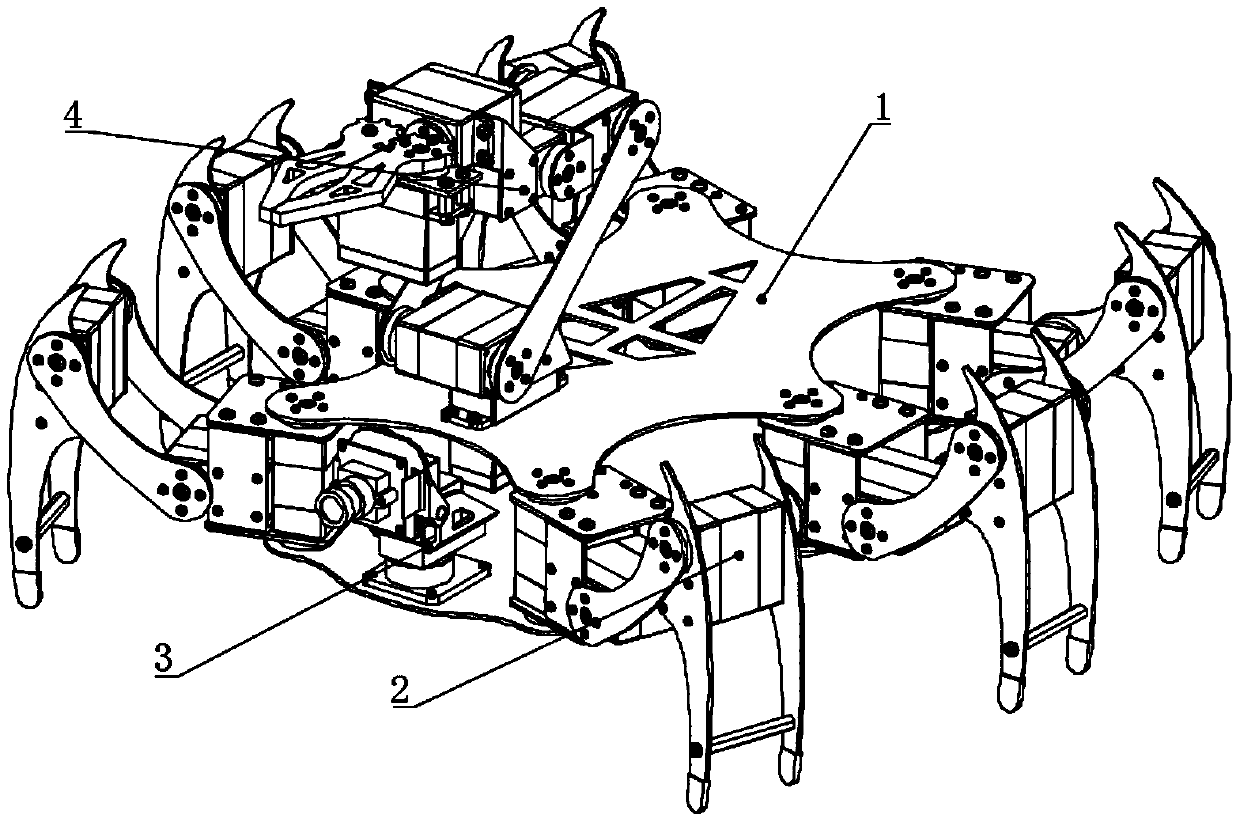
| 专利概述 | 本实用新型针对现有技术的不足,提供了六足仿生机器人,解决了现有六足机器人稳定性差,灵活性低的问题。同时解决了现有六足机器人质量大,操控困难等问题。从而使得该六足仿生机器人操作简单、运动灵活、负载能力强而且稳定性高,可运用于侦察、探险、搜救等。本实用新型提供了一种六足仿生机器人,其组成包括:躯干、机械腿、摄像云台、机械手,其中躯干中的舵盘与机械腿连接,同时躯干分别与摄像云台、机械手连接。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










