

| 专利名称 | 一种三角轮系爬楼车 | ||
|---|---|---|---|
| 申请号/专利号 | CN202021385825.7 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2020-07-15 | 授权日 | 2021-04-27 |
| 专利类别 | 实用新型 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 转向系统|控制工程|机器人|爬楼梯|轮系|支撑架|车架|转弯半径 | ||
| 应用领域 | 自行车|病人的椅子或专用运输工具 | ||
| 意向价格 | 具体面议 | ||
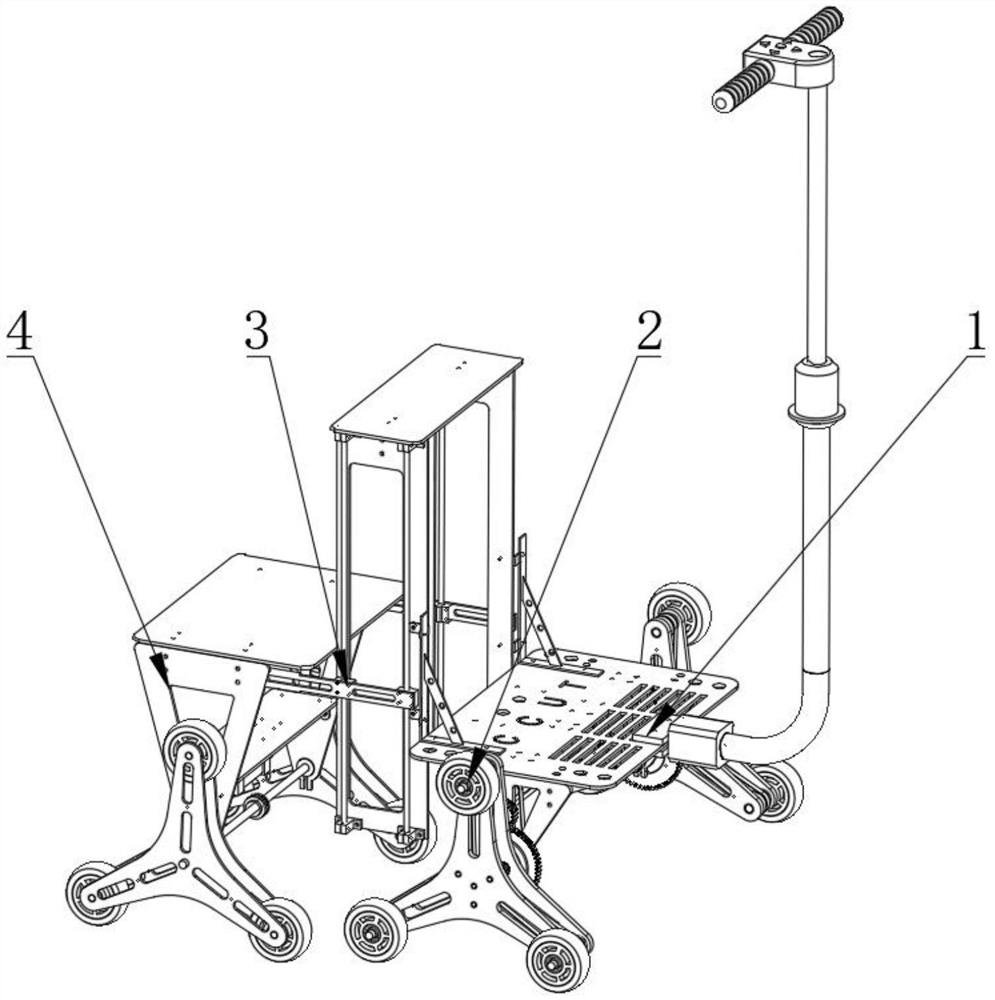
| 专利概述 | 本新型针对现有技术的不足,提供一种三角轮系爬楼车,采用了三角轮式机器人,传动系统运行平稳、噪音小、安全可靠,整体尺寸不大且重量较小;各个系统分别独立驱动,控制灵活方便;采用三角轮系式系统,使爬楼车能够在多种环境下运动,轻松实现在平地、坡面和台阶面上的运动;该爬楼车采用了独立的转向系统,转弯半径减小,有利于实现在狭小空间内的转弯。本发明提供了一种三角轮系爬楼车,其组成包括:车架控制部分、三角轮部分、滑动平台部分、承载支撑部分,其中车架控制部分中的三角形支架模块与三角轮部分中的中心轴连接,车架控制部分中的稳定三脚架与滑动平台部分中的支撑板连接,滑动平台部分中的牵连杆与承载支撑部分中的支撑架连接。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










