| 专利名称 |
一种磁驱动微纳米机器人的设计及其制备方法和驱动方式 |
| 申请号/专利号 |
CN202011421140.8 |
专利权人(第一权利人) |
长春工业大学 |
| 申请日 |
2020-12-08 |
授权日 |
2023-08-08 |
| 专利类别 |
授权发明 |
战略新兴产业分类 |
高端装备制造 |
| 技术主题 |
机械工程|微纳米|纳米工程|生物相容性|生物医学|CCD相机|微流控|激光直写|物理学|材料科学|类机器人|亥姆霍兹线圈 |
| 应用领域 |
电视系统的零部件|压电效应/电致伸缩或磁致伸缩的电动机|阻抗网络|诊断|半导体/固态器件零部件|手术|光波导的耦合|乳状液输送|压电/电致伸缩/磁致伸缩器件|微电子微观结构装置 |
| 意向价格 |
具体面议 |
| 专利概述 |
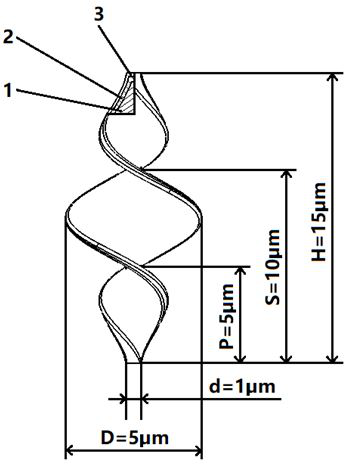
本发明公开了一种磁驱动微纳米机器人的结构设计及其制备方法和驱动方式。磁驱动微纳米机器人的主体结构为梭形双叶带式螺旋,通过路径优化后的双光子聚合激光直写技术实现了机器人的真三维制作,并在机器人的表面溅射了用于磁驱动的镍层和用于提高机器人的生物相容性的钛层,使用锥形旋转均匀磁场对机器人进行驱动,并通过将三轴亥姆霍兹线圈磁场发生装置与微动台、CCD相机和超声三维诊断仪等仪器进行结合,实现了机器人的体外高精度驱动和体内可视化驱动。本发明提供的一种磁驱动微纳米机器人,由于其体积小且具有生物相容性,在生物医学、微流控、纳米工程等领域具有重要的应用价值。 |
| 图片资料 |
|
| 合作方式 |
具体面议 |
| 联系人 |
戚梅宇 |
联系电话 |
13074363281 |












