

| 专利名称 | 一种事件触发-神经动态规划的机械臂分散跟踪控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202110561086.5 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2021-05-20 | 授权日 | 2023-12-08 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 事件触发|动态模型|系统动力学模型|计算机科学|控制工程|机械手臂|机械手|动态规划|神经网络|系统工程|性能控制 | ||
| 应用领域 | 程序控制机械手 | ||
| 意向价格 | 具体面议 | ||
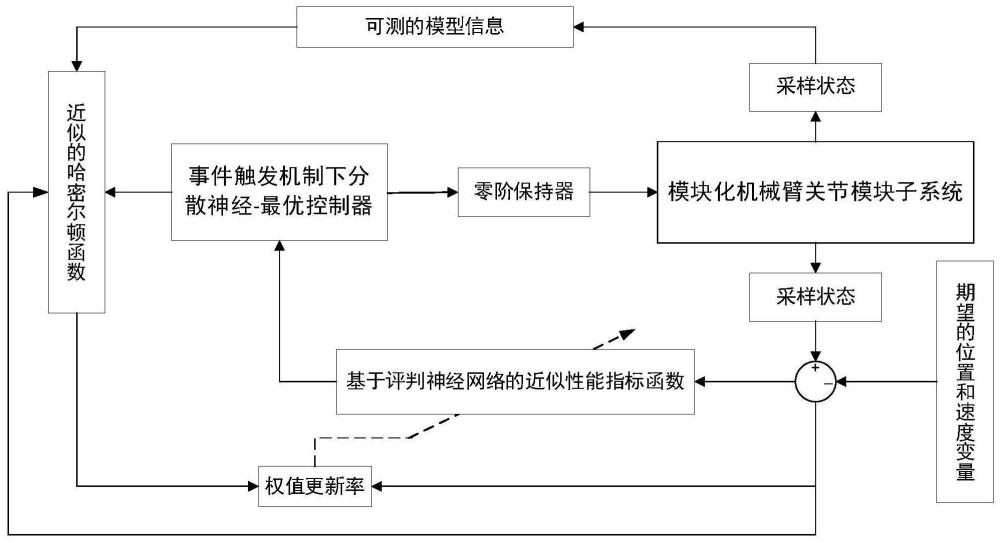
| 专利概述 | 一种事件触发‑神经动态规划的机械臂分散跟踪控制方法,该方法为:构建基于关节力矩反馈技术的模块化机械臂子系统动力学模型,通过设计综合跟踪性能、控制器输出和近似模型项的改进代价函数,引入事件触发机制,当且仅当满足触发条件时对系统控制律进行更新,利用评价神经网络近似求解基于事件触发机制的哈密尔顿方程,最终得到基于事件触发机制的模块化机械臂关节模块子系统神经‑最优跟踪控制策略,保证机械臂系统在与外界环境接触时安全稳定地运行。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










