

| 专利名称 | 一种柔性变刚度弹性驱动器及其控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202110683425.7 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2021-06-21 | 授权日 | 2022-09-06 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 往复运动|PID控制器|机器人|扭力弹簧|遥控伺服|控制算法|物理学|齿条 | ||
| 应用领域 | 爪臂 | ||
| 意向价格 | 具体面议 | ||
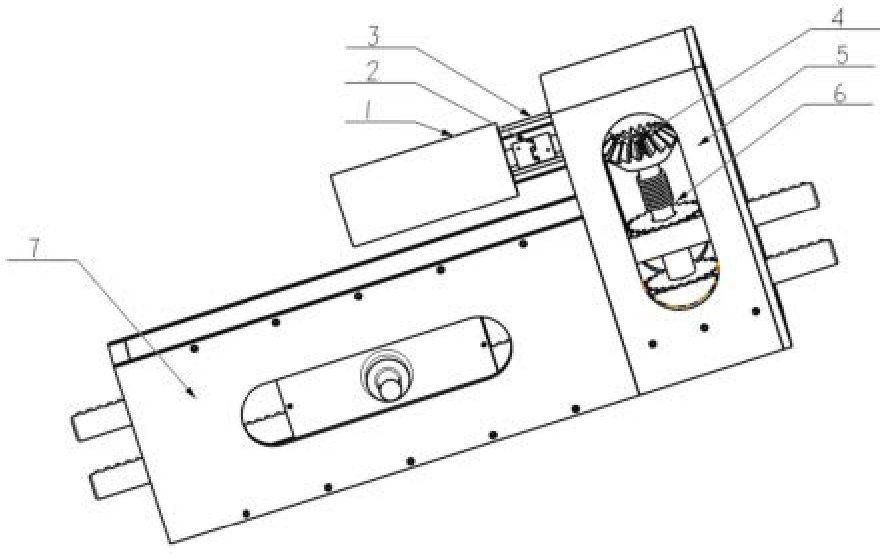
| 专利概述 | 本发明公开了一种柔性变刚度驱动器及其控制算法,基于两种不同刚度的弹簧和记忆合金线设计一种用于康复、助行类机器人的柔性变刚度驱动器,主要包括:驱动机构、往复传动机构、主动变刚度机构、驱动器输出机构、电源和控制器。通过PD控制器控制驱动机构中的伺服电机提供期望扭矩,扭簧带动往复传动机构中的圆形齿条和弹簧挡块往复运动,弹簧挡块推动主动变刚度机构实现输出杆往复运动。低刚度弹簧用于提供平均辅助力矩、减少输出阻抗和外部负载冲击,弹簧完全被压缩时,高刚度扭簧提供峰值力矩、提高系统带宽和增大扭矩范围。通过PID控制器控制记忆合金线的温度改变弹簧预压缩实现驱动器主动变刚度,提高驱动器的机动性和使用效率。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










