

| 专利名称 | 一种可重构机器人人类意图辨识控制方法及装置 | ||
|---|---|---|---|
| 申请号/专利号 | CN202111055802.9 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2021-09-09 | 授权日 | 2023-09-08 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 动态模型|绩效指标|动态规划|最优控制|自适应|神经网络|类机器人|机器人动态|控制力矩|动力学模型|仿真|实时计算|人类 | ||
| 应用领域 | 程序控制机械手|接头 | ||
| 意向价格 | 具体面议 | ||
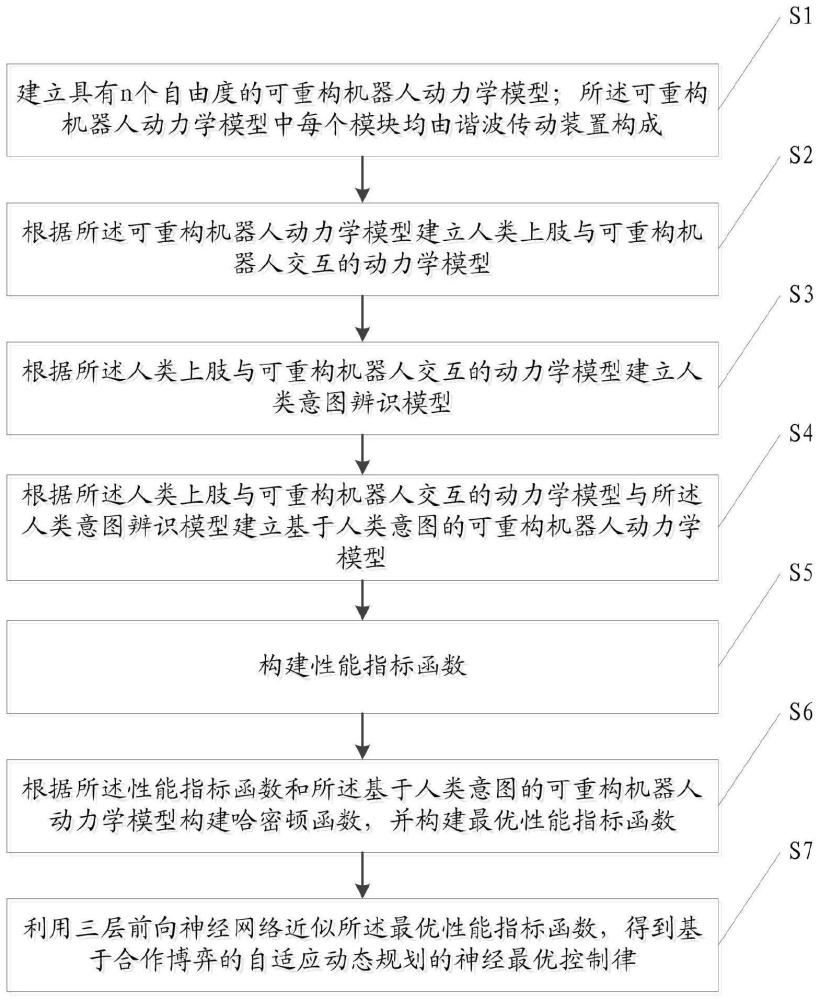
| 专利概述 | 本发明涉及一种可重构机器人人类意图辨识最优控制方法及装置,通过建立具有n个自由度的可重构机器人动力学模型,建立人类上肢与可重构机器人交互的动力学模型,建立人类意图辨识模型,建立基于人类意图的可重构机器人动力学模型,构建性能指标函数,构建哈密顿函数,并构建最优性能指标函数;最终利用三层前向神经网络近似所述最优性能指标函数,得到基于合作博弈的自适应动态规划的神经最优控制律。本发明仅采用了机器人本体的位置信息,没有使用其他传感器信息,可以降低实验成本并提高系统的跟踪精度。在控制力矩方面,本发明的控制力矩更加连续和平滑,不仅可以保持系统渐进稳定,而且可以降低每个关节的能量损耗。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










