

| 专利名称 | 一种基于两杆张拉机构的折纸爬行机器人 | ||
|---|---|---|---|
| 申请号/专利号 | CN202111371673.4 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2021-11-18 | 授权日 | 2023-06-09 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 机械工程|经典力学|机器人|工业机器人|复杂控制系统 | ||
| 应用领域 | 机动车 | ||
| 意向价格 | 具体面议 | ||
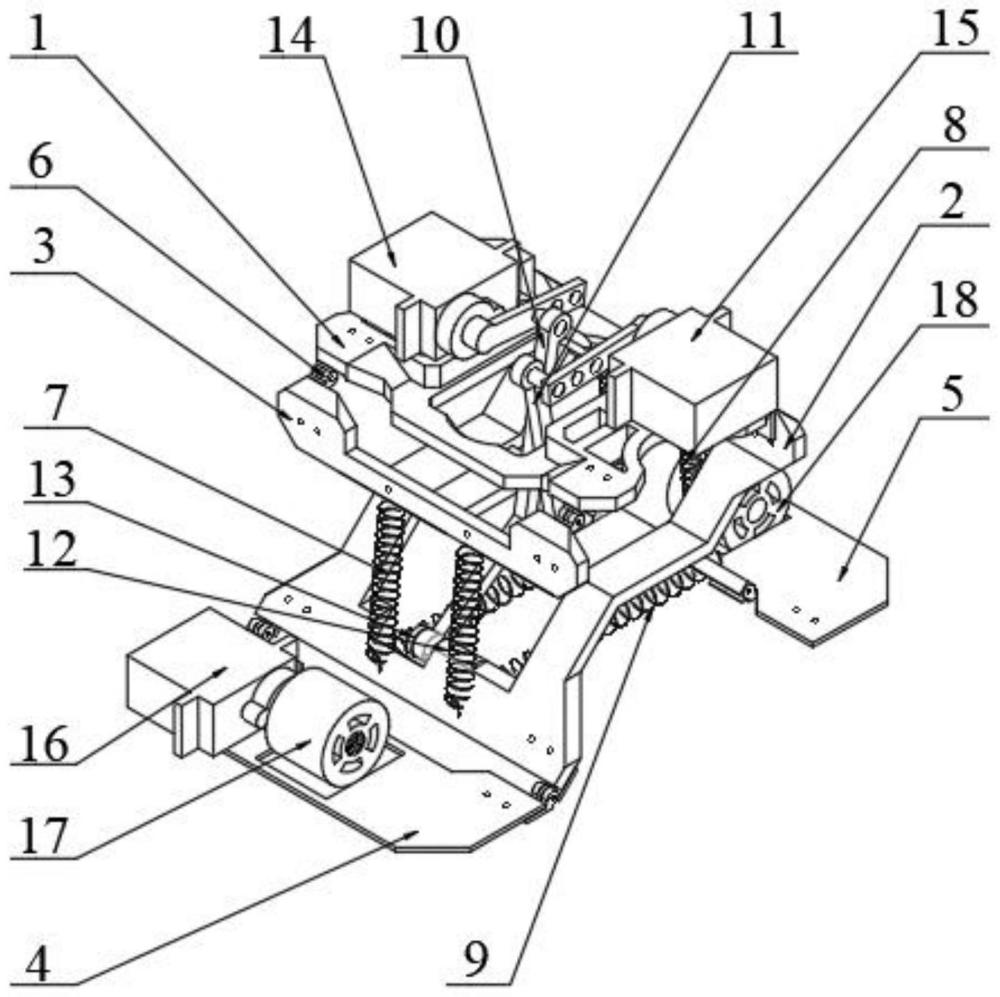
| 专利概述 | 本发明涉及一种基于两杆张拉机构的折纸爬行机器人,包括:第一连接板,两杆张拉机构,爬行足以及折纸驱动机构,与传统工业机器人、轮式机器人等相比较,本发明通过两杆张拉机构、折纸驱动机构的配合应用,改变了传统机器人体积大,质量沉,柔性差,控制系统复杂等不足。本发明可变形性强,自适应性强,抗多向冲击力强,稳定性高,结构制造简单便捷,占地面积小且制造费用低。能够实现爬行的运动状态,可以在多种地形中完成搜寻和运输,有望大力发展,在爬行机器人领域或更多领域实现其实际应用价值。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










