

| 专利名称 | 基于八面体桅杆型张拉整体结构的仿人足式机构及装置 | ||
|---|---|---|---|
| 申请号/专利号 | CN202111388234.4 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2021-11-22 | 授权日 | 2023-09-01 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 机械工程|物理治疗|生物运动|仿生学|跖屈|康复医学|拉伸结构|复杂控制系统|张拉整体|类机器人 | ||
| 应用领域 | 机动车 | ||
| 意向价格 | 具体面议 | ||
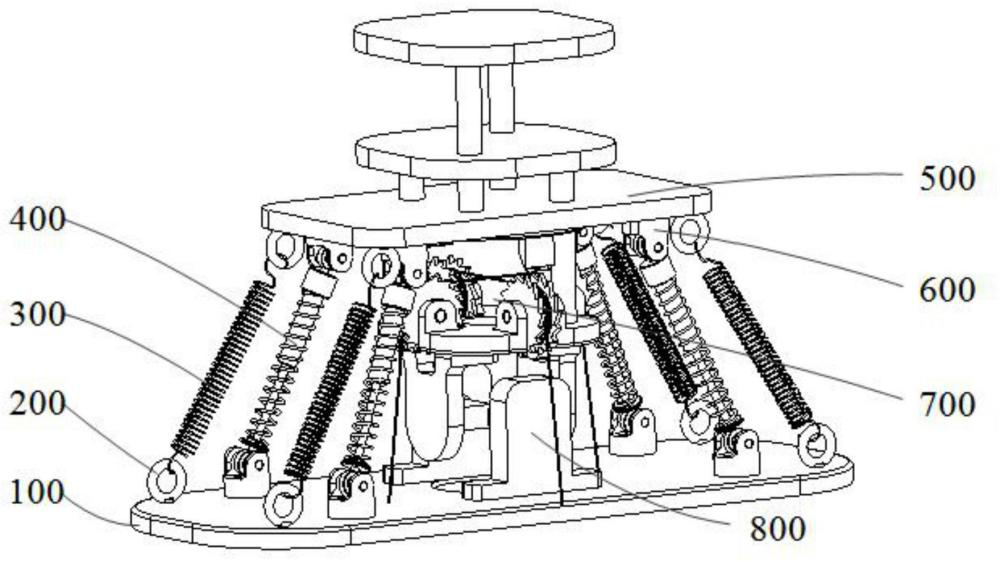
| 专利概述 | 本发明涉及基于八面体桅杆型张拉整体结构的仿人足式机构及装置,仿人足式机构包括底板,转向机构组件,顶板组件及八面体桅杆型张拉整体结构。本发明克服了传统仿人足式机构质量沉重,体积庞大,控制系统复杂,柔顺性较差,运动单一等不足,兼具顺应性、稳定性结构,结构简单,制造工艺简便,且八面体桅杆型张拉整体结构与锁定机构组件相结合,能够实现仿人足式机构的自锁,不需要通过控制实现自锁,可以确保足式机器人同时具有仿生学特性和机构学特性。本发明结构简单,同时机构的运动过程中,可以模拟踝关节背屈、跖屈、内翻和外翻的生物学运动特征,有望大力发展,在多领域实现其应用价值。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










