

| 专利名称 | 一种基于两杆张拉适应性机构的仿人手指装置 | ||
|---|---|---|---|
| 申请号/专利号 | CN202111546458.3 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2021-12-16 | 授权日 | 2023-05-26 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 指关节|工业工程学|四连杆机构 | ||
| 应用领域 | 接头|夹头|抵抗媒介传播的疾病 | ||
| 意向价格 | 具体面议 | ||
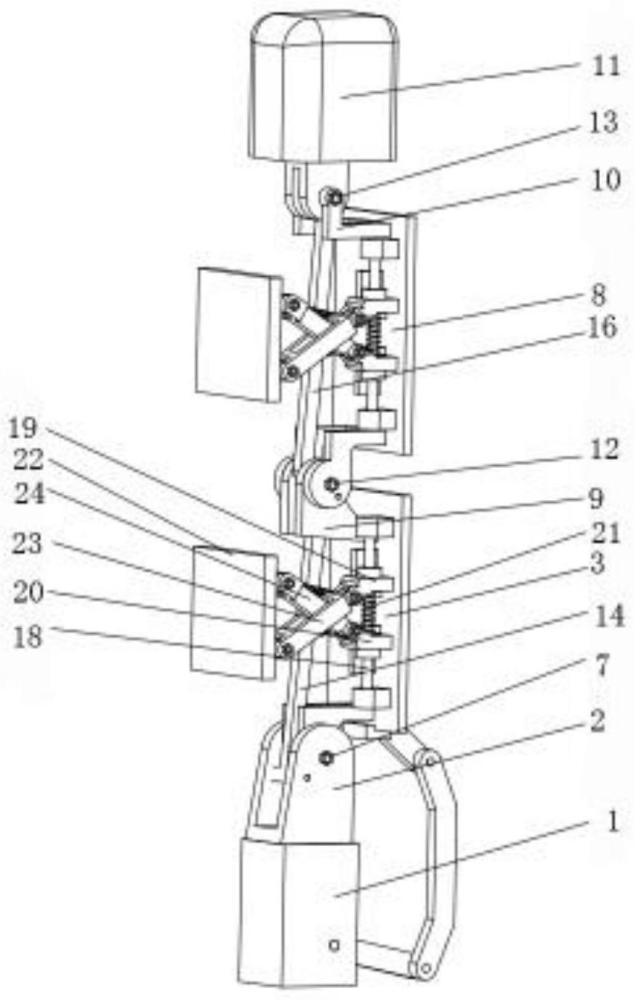
| 专利概述 | 本发明公开了一种基于两杆张拉适应性机构的仿人手指装置,包括第一四连杆机构、第二四连杆机构,第三四连杆机构,耦合杆组件、第一两杆张拉适应性机构和第二两杆张拉适应性机构;第一四连杆机构与第三四连杆机构铰接,并通过耦合杆组件传动连接;第一两杆张拉适应性机构安装在第一四连杆机构上;第二两杆张拉适应性机构安装在第三四连杆机构上。本发明指段与指关节之间形成的四连杆机构能够实现仿人手指的屈曲和伸展运动,同时利用两杆张拉整体结构的适应性,通过两杆张拉适应性机构形成对不同物体形状的适应性抓取,在连杆机构提供较大抓取力和可靠性的同时,又可以通过张拉机构自适应抓取不同形状物体,制造和维修成本低。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










