

| 专利名称 | 一种输入受限机械臂的合作博弈最优跟踪控制方法及系统 | ||
|---|---|---|---|
| 申请号/专利号 | CN202111653984.X | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2021-12-30 | 授权日 | 2023-05-26 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 动态模型|状态空间 (计算机科学)|绩效指标|人工智能|状态变数|工业工程学|状态空间方程|设计过程|机械手系统|能源消耗 | ||
| 应用领域 | 程序控制机械手|接头|全面工厂控制|爪臂 | ||
| 意向价格 | 具体面议 | ||
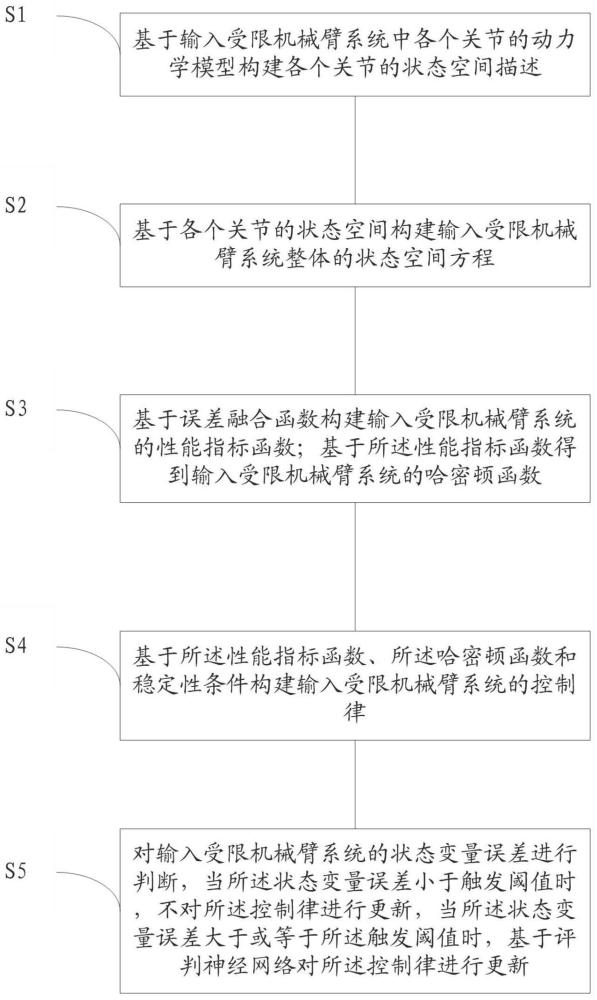
| 专利概述 | 本发明涉及一种输入受限机械臂的合作博弈最优跟踪控制方法及系统,首先,基于输入受限机械臂系统中各个关节的动力学模型构建各个关节的状态空间描述;并基于各个关节的状态空间描述构建机械臂系统的状态空间方程;然后基于误差融合函数构建输入受限机械臂系统的性能指标函数;并基于所述性能指标函数得到输入受限机械臂系统的哈密顿函数;其次基于所述性能指标函数、所述哈密顿函数和稳定性条件构建输入受限机械臂系统的控制律;最后基于系统的状态变量误差和触发阈值对所述控制律进行更新。本发明降低了设计过程的复杂性,减少了运行过程中的计算量,不仅使跟踪过程中控制力矩更加连续和平滑,还使机械臂系统的综合能耗达到最优。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










