

| 专利名称 | 一种模块化机械臂协调操作最优控制方法及系统 | ||
|---|---|---|---|
| 申请号/专利号 | CN202210003586.1 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2022-01-05 | 授权日 | 2022-09-30 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 动态模型|控制工程|绩效指标|机械手|最优控制|工业工程学|动力学模型|模块化|能源消耗 | ||
| 应用领域 | 程序控制机械手|爪臂 | ||
| 意向价格 | 具体面议 | ||
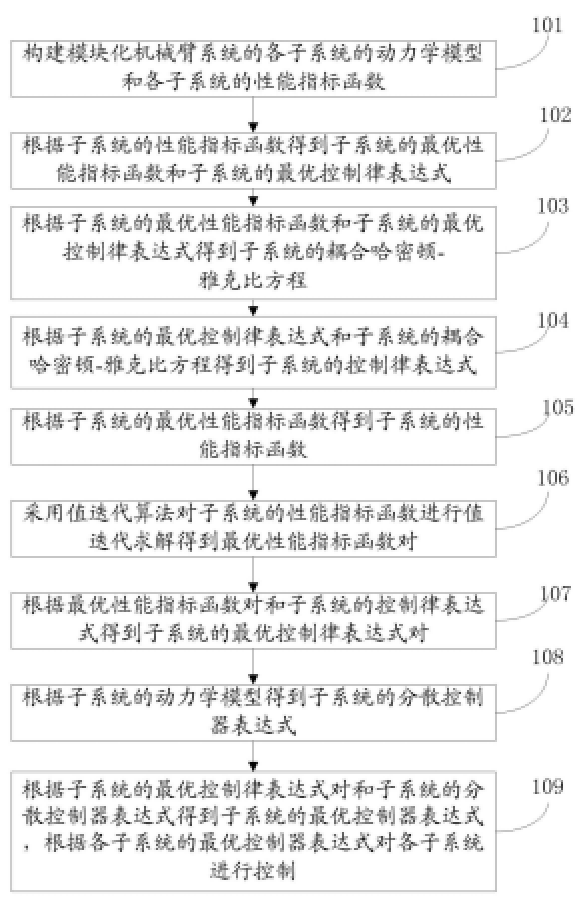
| 专利概述 | 本发明涉及一种模块化机械臂协调操作最优控制方法及系统。所述方法包括:根据性能指标函数得到最优性能指标函数和最优控制律表达式;根据最优性能指标函数和最优控制律表达式得到耦合哈密顿‑雅克比方程;根据最优控制律表达式和耦合哈密顿‑雅克比方程得到控制律表达式;根据最优性能指标函数得到性能指标函数;采用值迭代算法对性能指标函数进行值迭代求解得到最优性能指标函数对;根据最优性能指标函数对和控制律表达式得到最优控制律表达式对;根据动力学模型得到分散控制器表达式;根据最优控制律表达式对和分散控制器表达式得到最优控制器表达式。本发明可以解决现有技术中对于多个子系统不能保证整体能耗最优的协调操作问题。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










