

| 专利名称 | 基于改进最近点配准的斗轮机无人化作业定位建图方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202210401598.X | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2022-04-18 | 授权日 | 2023-03-28 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 工程学|主成分分析算法|机器视觉|成分分析|迭代最近点|算法|局部最优|体素 | ||
| 应用领域 | 图像增强|图像分析|水力发电|电磁波的再辐射 | ||
| 意向价格 | 具体面议 | ||
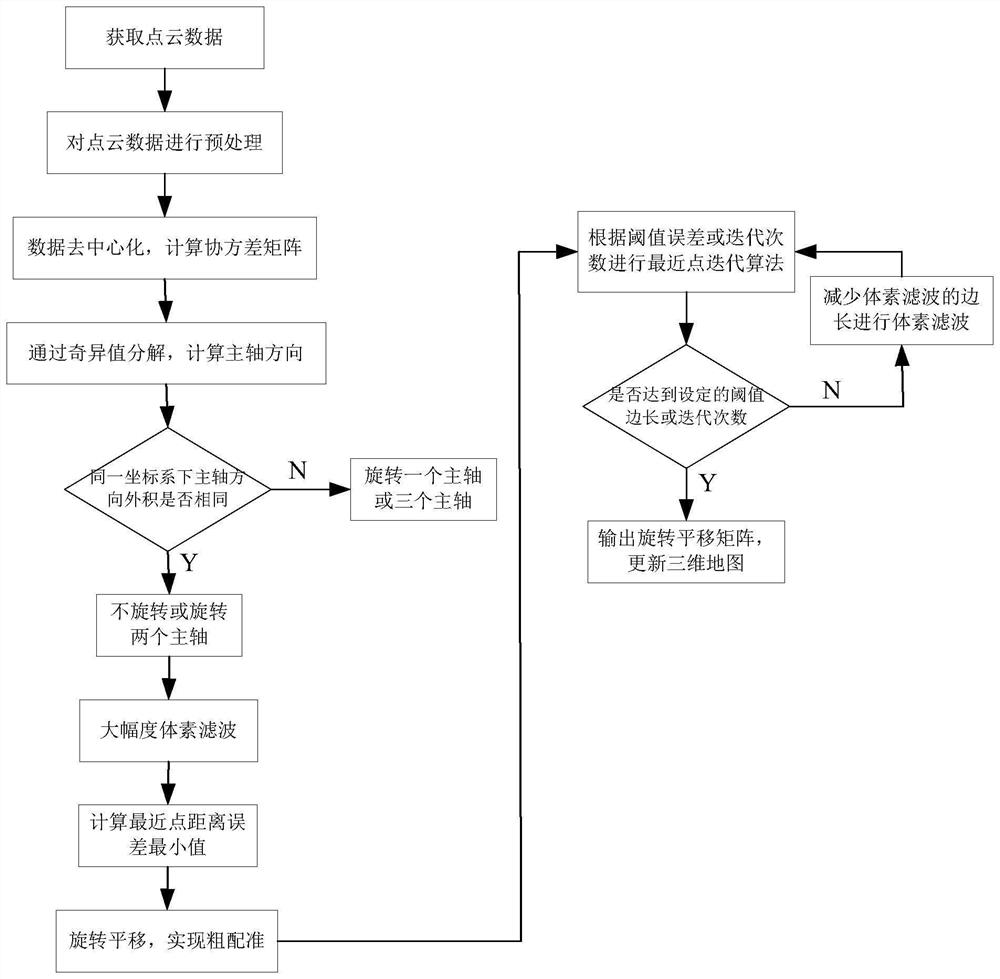
| 专利概述 | 基于改进最近点配准的斗轮机无人化作业定位建图方法,涉及机器视觉领域,解决了现有技术采用迭代最近点算法计算开销大、对初始变换敏感、容易陷入局部最优解等问题。本发明通过主成成分分析算法,为迭代最近点算法提供了良好的初始值,针对主成成分分析算法中两帧点云主轴方向难以对齐的问题,计算了其中任选两个主轴的外积,通过两帧点云外积方向相同或相反来确定两帧点云的主轴方向相反的个数,从而将8次循环判断减少到了4次,加速了点云粗配准的速度,同时对于点云精确配准,将体素滤波加入了最近点迭代的循环当中,使得点云精确配准的迭代时间减少,最终提高了斗轮机定位与建图的实时性与精确性。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










