

| 专利名称 | 基于状态观测的四轮独立转向电动汽车转向控制方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202211205919.5 | 专利权人(第一权利人) | 吉林大学 |
| 申请日 | 2022-09-30 | 授权日 | 2024-09-17 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 转向系统|状态观测器|机械工程|转向控制|汽车模型|滑移角|电动载具|横摆稳定性控制|卡西姆 | ||
| 应用领域 | 转向拉杆|自动转向控制部件|自适应控制 | ||
| 意向价格 | 具体面议 | ||
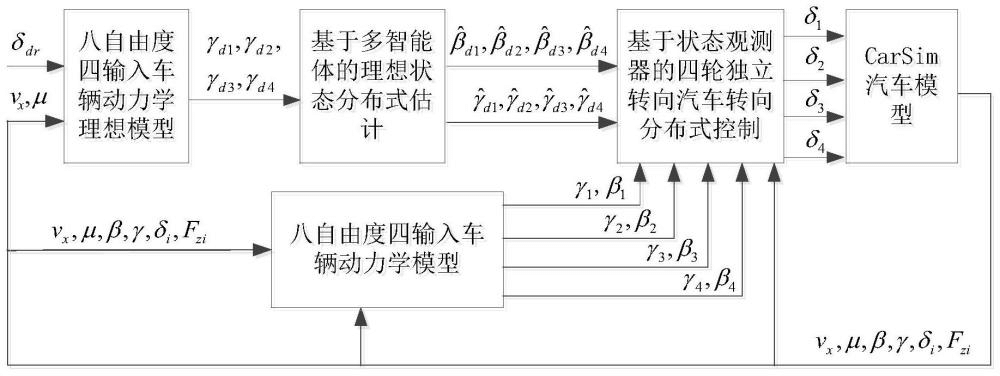
| 专利概述 | 基于状态观测的四轮独立转向电动汽车转向控制方法涉及汽车四轮独立转向系统控制领域,该方法利用八自由度四输入车辆动力学理想模型确定四个车轮理想的横摆角速度,利用八自由度四输入车辆动力学模型确定四个车轮实时的横摆角速度和质心侧偏角,利用基于多智能体的理想状态分布式估计模块确定四个车轮理想的横摆角速度和质心侧偏角估计值,利用基于状态观测器的四轮独立转向汽车转向分布式控制模块求解出汽车的四个车轮转角,利用CarSim汽车模型实现汽车的横摆稳定性控制,并输出汽车的实时运动状态信息。本发明有效权衡了计算效率和车辆稳定性能,提高了部分理想状态未知情况下四轮独立转向车辆转向控制的稳定性。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










