

| 专利名称 | 一种基于张拉整体结构的仿生前臂外骨骼助力机构 | ||
|---|---|---|---|
| 申请号/专利号 | CN202310783280.7 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2023-06-29 | 授权日 | 2025-08-08 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 前臂|关节运动|人体|上肢|腕关节|物理治疗|生物学|上肢结构|生物医学工程|手腕|张拉整体 | ||
| 应用领域 | 程序控制机械手 | ||
| 意向价格 | 具体面议 | ||
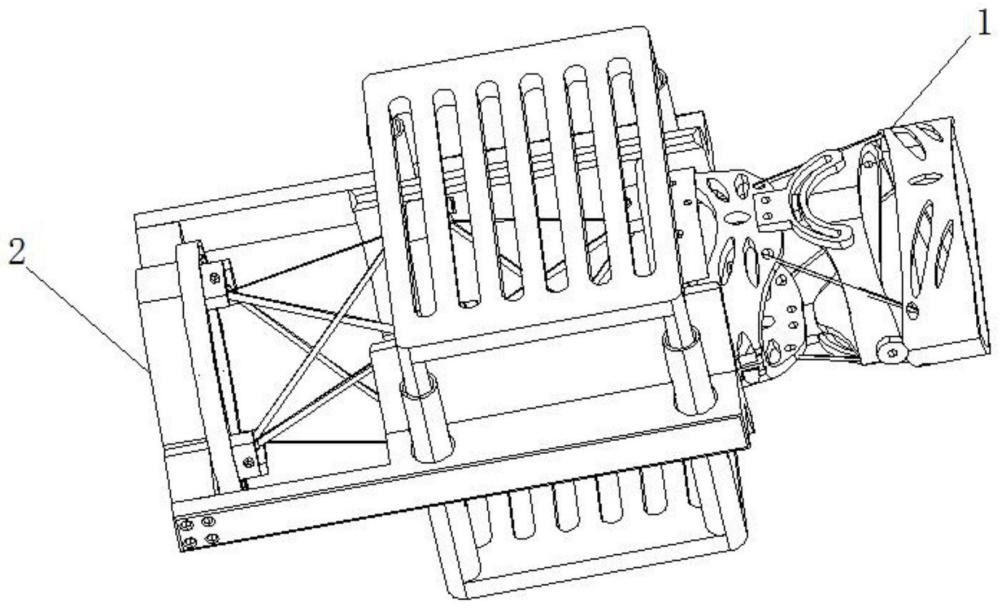
| 专利概述 | 本发明公开了一种基于张拉整体结构的仿生前臂外骨骼助力机构,包括从前到后依次连接的两杆张拉手腕机构和四杆张拉前臂机构。本发明将张拉结构与仿生前臂外骨骼助力设备相结合,通过仿生分析建立前臂以及腕关节的张拉结构映射,并且研究并分析人体上肢结构特征和关节运动特性,确定结构参数和运动参数,利用张拉结构能依靠自身结构适应环境并保持自平衡自稳定特点,解决了外骨骼助力设备设计的问题,可以更好的与人体前臂运动过程中进行贴合,同时具有轻量化,便于穿戴特点,基于张拉技术所设计的仿生外骨骼机器人不仅可以起到身体支撑的作用,更可以辅助肢体运动,还有结构轻巧、穿戴方便、操作柔顺,同时保证穿戴的舒适性和安全性优点。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










