

| 专利名称 | 一种全周向高精度夹持机械手 | ||
|---|---|---|---|
| 申请号/专利号 | CN202322647016.9 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2023-09-28 | 授权日 | 2024-06-21 |
| 专利类别 | 实用新型 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 结构工程|机械手|机械手|轴承 | ||
| 应用领域 | 夹头 | ||
| 意向价格 | 具体面议 | ||
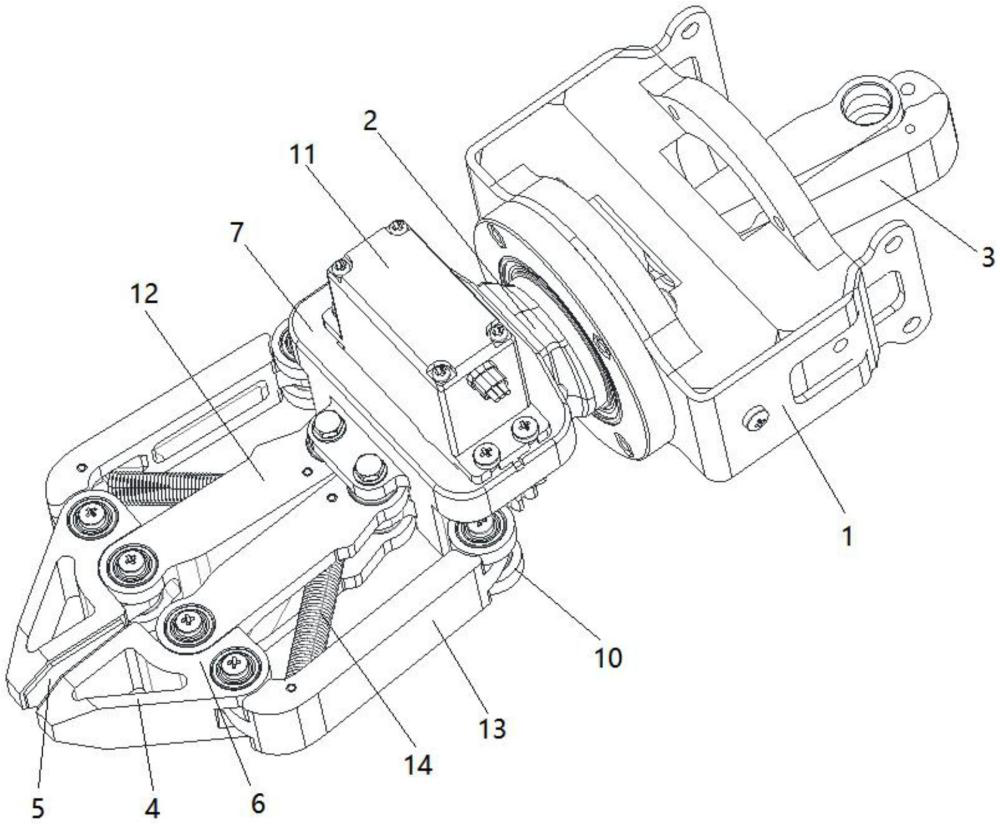
| 专利概述 | 本实用新型为一种全周向高精度夹持机械手,涉及机械手技术领域。技术特征包括:连接架,其用以与外部机械臂连接;主转动臂,其一端通过轴承可转动连接在所述连接架上;以及夹爪和驱动所述夹爪开合的连杆传动式驱动机构,所述连杆传动式驱动机构设置在所述主转动臂上反向于所述连接架的一端以使所述夹爪随所述主转动臂转动。本装置通过主转动臂对夹爪的转动支撑,同时利用连杆传动式驱动机构对夹爪的夹持动作驱动,使夹爪精准的夹持在被夹持工件上,以使本机械手更好的对工件进行精准夹持,避免工件被夹持受损。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










