

| 专利名称 | 一种G3连续且运动平稳的机器人路径光顺方法 | ||
|---|---|---|---|
| 申请号/专利号 | CN202411805855.1 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2024-12-10 | 授权日 | 2025-10-28 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 机器人路径|G3连续|路径光顺|运动平稳|轨迹规划|机器人控制|智能制造 | ||
| 应用领域 | 程序控制机械手 | ||
| 意向价格 | 具体面议 | ||
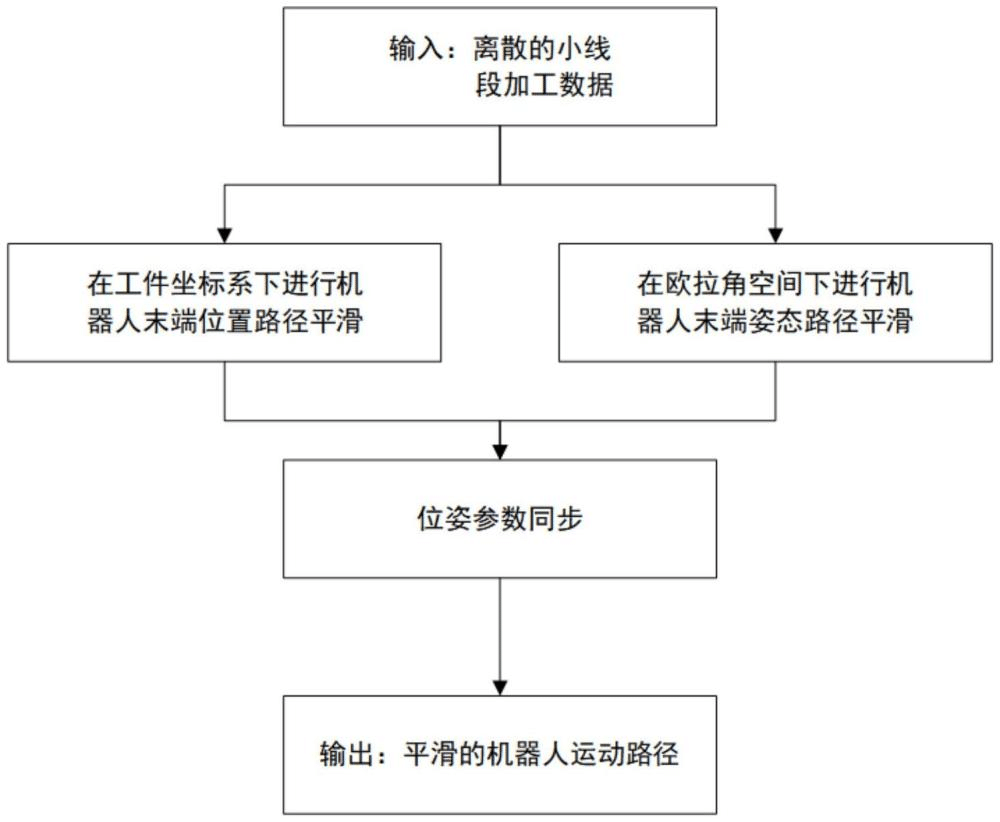
| 专利概述 | 本发明是一种G3连续且运动平稳的机器人路径光顺方法。首先,在工件坐标系下进行机器人末端位置路径光顺,通过构建6次Bezier曲线拐角过渡模型,实现路径衔接处的位置G3连续平滑转接;其次,在绕工件坐标系的欧拉角空间内进行机器人末端姿态路径光顺,通过构建6次Bezier曲线拐角过渡模型,实现路径衔接处的姿态G3连续平滑转接;最后,对转接光顺后的机器人末端位置和姿态路径进行参数同步处理,通过考虑位姿同步条件和位姿路径的几何特性自适应调整位置、姿态过渡参数,确保末端姿态相对于位置路径弧长的一阶、二阶、三阶导连续。本发明能实现机器人末段位姿G3连续平滑转接,没有任何迭代计算,光顺误差可控的同时机器人末端工具刀轴角运动更平稳。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










