

| 专利名称 | 一种四足两臂机器人 | ||
|---|---|---|---|
| 申请号/专利号 | CN202510813342.3 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2025-06-18 | 授权日 | 2025-09-09 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 经典力学|平衡机|控制理论|机器人技术|类机器人 | ||
| 应用领域 | 机动车 | ||
| 意向价格 | 具体面议 | ||
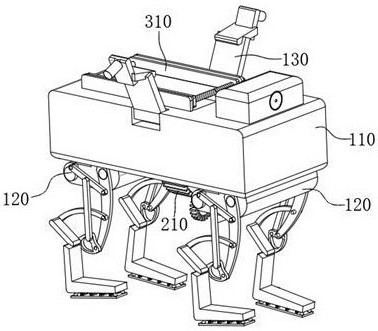
| 专利概述 | 本发明属于行走机器人技术领域,具体涉及一种四足两臂机器人,包括机器人主体、重心平衡机构以及加固机构,机器人主体包括顶部具有置物槽的基座、位于基座底部前后两端的仿生驱动脚以及活动安装在基座顶部两侧的机械臂;当仿生驱动脚的底部压到障碍物或者斜坡导致机器人主体一侧重心不稳时,自动驱动重心平衡机构进行工作,对机器人主体的重心进行自动平衡;当重心平衡机构工作时,自动带动加固机构同步工作,对置物槽内的物品的稳定性进行加固,该种四足两臂机器人,替代传统的四足两臂机器人,避免了其行走在复杂的路面环境时,由于重心不稳无法及时修正自身平衡后导致倾倒,从而对自身以及携带物品造成伤害的问题。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










