

| 专利名称 | 一种基于绳驱动的仿生腕关节 | ||
|---|---|---|---|
| 申请号/专利号 | CN202511327350.3 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2025-09-17 | 授权日 | 2025-11-14 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 腕骨沟|腕关节|Carpus Bone|腱鞘|腕骨近端|驱动轮|滑轮|关节|前臂|电机|物理治疗|腕骨|韧带|康复医学|前臂骨|机器人技术 | ||
| 应用领域 | 程序控制机械手|接头 | ||
| 意向价格 | 具体面议 | ||
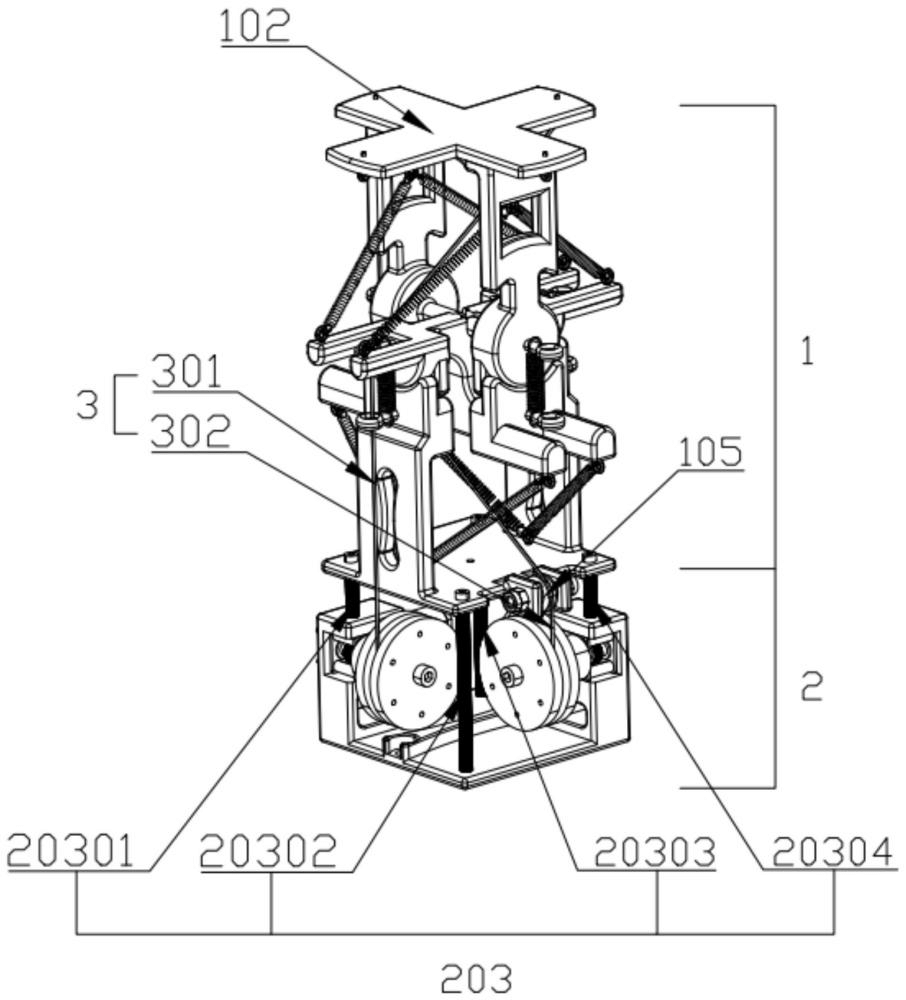
| 专利概述 | 本发明公开了一种基于绳驱动的仿生腕关节,属于仿生机器人技术领域。该关节主要包括活动部分、驱动部分和仿肌腱绳索组。活动部分由仿远端列腕骨构件、仿近端列腕骨构件和仿前臂骨构件组成,通过仿韧带弹性体构成两个两杆四索张拉整体单元进行联接,并在构件联接处形成有仿腕骨沟防错位结构。驱动部分包含电机驱动的驱动轮组。两根仿肌腱绳索经由滑轮和仿腱鞘吊环螺栓引导,穿过构件间隙后固定在活动部分远端。本发明利用仿腕骨沟防错位结构有效约束自由度、防止错位及提升稳定性,结合绳驱动,实现了约180°屈曲/伸展和90°内收/外展的双自由度仿生运动。具有结构简洁、自恢复性强等特点,适用于需要高灵活性和环境适应性的机器人操作场景。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










