

| 专利名称 | 一种基于肌小节的仿生柔性驱动器 | ||
|---|---|---|---|
| 申请号/专利号 | CN202511460362.3 | 专利权人(第一权利人) | 长春工业大学 |
| 申请日 | 2025-10-14 | 授权日 | 2025-12-23 |
| 专利类别 | 授权发明 | 战略新兴产业分类 | 高端装备制造 |
| 技术主题 | 机械工程|控制工程|机器人|气动人造肌肉|控制理论|机器人技术|变形控制|肌小节 | ||
| 应用领域 | 程序控制机械手 | ||
| 意向价格 | 具体面议 | ||
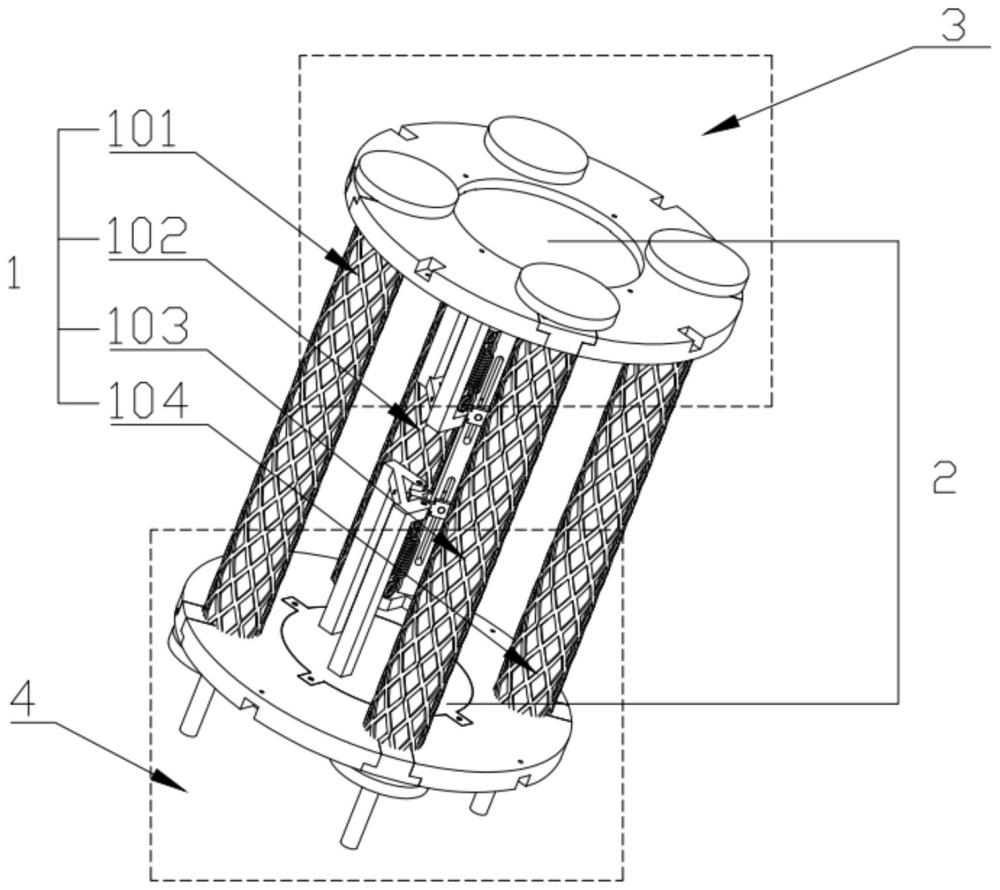
| 专利概述 | 本发明公开了一种基于肌小节的仿生柔性驱动器,属于软体机器人技术领域。该驱动器包括外部气动人工肌肉驱动单元组、内部仿生张拉整体骨架以及上下连接盘扣组。外部气动人工肌肉驱动单元组由四个呈十字形分布的外部气动人工肌肉驱动单元构成,作为主动驱动源;内部张拉整体骨架通过预应力实现自平衡与自稳定。通过对各外部气动人工肌肉驱动单元施加差异化气压,控制其产生非一致轴向收缩,从而驱动整体实现可控弯曲运动。本发明融合肌小节仿生原理与张拉整体结构,在保持良好柔顺性的同时显著提升了刚度和稳定性,有效解决了传统柔性驱动器刚性弱、响应慢及变形控制精度不足的问题,适用于需要高灵活性和环境适应性的机器人操作场景。 | ||
| 图片资料 |
|
||
| 合作方式 | 具体面议 | ||
| 联系人 | 戚梅宇 | 联系电话 | 13074363281 |










